ROI Analysis Tools
On this page
ROI Analyzer
- class simba.roi_tools.ROI_analyzer.ROIAnalyzer(config_path, data_path=None, detailed_bout_data=False, calculate_distances=False, threshold=0.0, body_parts=None)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.feature_extraction_mixin.FeatureExtractionMixinAnalyze movements, entries, exits, and time-spent-in user-defined ROIs. Results are stored in the ‘project_folder/logs’ directory of the SimBA project.
- Parameters
config_path (str) – Path to SimBA project config file in Configparser format.
data_path (Optional[str]) – Path to folder or file holding the data used to calculate ROI aggregate statistics. If None, then defaults to the project_folder/csv/outlier_corrected_movement_location directory of the SimBA project. Default: None.
calculate_distances (Optional[bool]) – If True, then calculate movements aggregate statistics (distances and velocities) inside ROIs. Results are saved in
project_folder/logs/directory. Default: False.detailed_bout_data (Optional[bool]) – If True, saves a file with a row for every entry into each ROI for each animal in each video. Results are saved in
project_folder/logs/directory. Default: False.threshold (Optional[float]) – Float between 0 and 1. Body-part locations detected below this confidence threshold are filtered. Default: 0.0.
body_parts (Optional[List[str]]) – List of body-parts to perform ROI analysis on.
Note
- Example
>>> test = ROIAnalyzer(config_path = r"/Users/simon/Desktop/envs/simba/troubleshooting/two_black_animals_14bp/project_folder/project_config.ini", calculate_distances=True, detailed_bout_data=True, body_parts=['Nose_1', 'Nose_2'], threshold=0.0) >>> test.run() >>> test.save()
ROI Classification Calculator - Single Core
- class simba.roi_tools.roi_clf_calculator.ROIClfCalculator(config_path, bp_names, save_path=None, data_paths=None, roi_coordinates_path=None, clf_names=None, roi_names=None, clf_time=True, started_bout_cnt=True, ended_bout_cnt=True, bout_table=False, transpose=False, verbose=True)[source]
Bases:
simba.mixins.config_reader.ConfigReaderCompute aggregate statistics of classification results within user-defined ROIs. Results are stored in project_folder/logs directory of the SimBA project.
For each video, classifier, ROI and body-part, a frame counts only when the body-part is inside the ROI and the classifier is active (logical AND) - behaviour occurring outside the ROI is excluded. Bouts of this in-ROI behaviour are detected and summarised as
TOTAL BEHAVIOR TIME IN ROI (S),STARTED BEHAVIOR BOUTS IN ROI (COUNT)andENDED BEHAVIOR BOUTS IN ROI (COUNT), returned in long format (one row per measure, optionally transposed to wide). Withbout_table=Truea detailed per-bout table is also saved.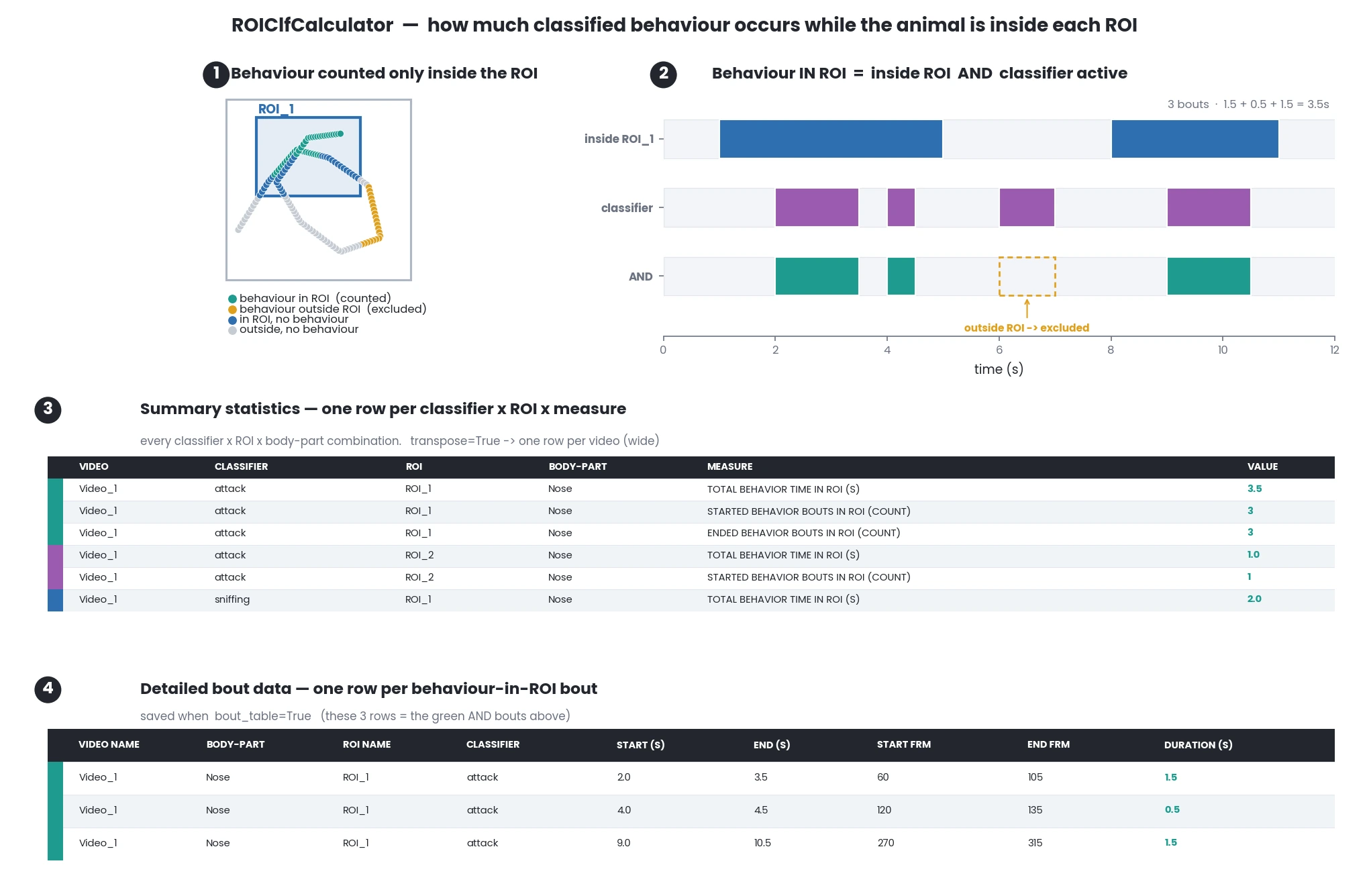
See also
For multicore CPU process, see
simba.roi_tools.roi_clf_calculator_mp.ROIClfCalculatorMultiprocess()- Parameters
config_path (Union[str, os.PathLike]) – path to SimBA project config file in Configparser format
bp_names (List[str]) – List of body-parts to use as proxy for animal locations.
save_path (Optional[Union[str, os.PathLike]]) – Optional location where to store the results in CSV format. If None, then results are stored in logs folder of SImBA project.
data_paths (Optional[List[Union[str, os.PathLike]]]) – Optional list of data files to analyze. If None, then all file sin the
machine_resultsdirectory is analyzed.clf_names (Optional[List[str]]) – Optional List of classifiers to analyze. If None, then all classifiers in SimBA project are analyzed.
roi_names (Optional[List[str]]) – Optional list of ROI names to analyze. If None, then all ROI names are analyzed.
clf_time (bool) – If True, computes aggregate time of each classifier in each ROI. Deafult True.
started_bout_cnt (bool) – If True, computes started bout counts of each classifier in each ROI. Deafult True.
ended_bout_cnt (bool) – If True, computes ended bout counts of each classifier in each ROI. Deafult True.
Note
‘GitHub tutorial <https://github.com/sgoldenlab/simba/blob/master/docs/Scenario2.md#part-4–analyze-machine-results`__.
- Example
>>> analyzer = ROIClfCalculator(config_path=r"D: roubleshooting\mitra\project_folder\project_config.ini", bp_names=('nose',), clf_names=('straub_tail',)) >>> analyzer.run() >>> analyzer.save()
ROI Classification Calculator - Multiprocess
- class simba.roi_tools.roi_clf_calculator_mp.ROIClfCalculatorMultiprocess(config_path, bp_names, save_path=None, data_paths=None, roi_coordinates_path=None, clf_names=None, roi_names=None, clf_time=True, started_bout_cnt=True, ended_bout_cnt=True, bout_table=False, transpose=False, verbose=True, core_cnt=- 1)[source]
Bases:
simba.mixins.config_reader.ConfigReaderCompute aggregate statistics of classification results within user-defined ROIs. Results are stored in project_folder/logs directory of the SimBA project.
For each video, classifier, ROI and body-part, a frame counts only when the body-part is inside the ROI and the classifier is active (logical AND) - behaviour occurring outside the ROI is excluded. Bouts of this in-ROI behaviour are detected and summarised as
TOTAL BEHAVIOR TIME IN ROI (S),STARTED BEHAVIOR BOUTS IN ROI (COUNT)andENDED BEHAVIOR BOUTS IN ROI (COUNT), returned in long format (one row per measure, optionally transposed to wide). Withbout_table=Truea detailed per-bout table is also saved. This class distributes videos across multiple CPU cores.
See also
For single core process, see
simba.roi_tools.roi_clf_calculator.ROIClfCalculator()- Parameters
config_path (Union[str, os.PathLike]) – path to SimBA project config file in Configparser format
bp_names (List[str]) – List of body-parts to use as proxy for animal locations.
save_path (Optional[Union[str, os.PathLike]]) – Optional location where to store the results in CSV format. If None, then results are stored in logs folder of SImBA project.
data_paths (Optional[List[Union[str, os.PathLike]]]) – Optional list of data files to analyze. If None, then all file sin the
machine_resultsdirectory is analyzed.clf_names (Optional[List[str]]) – Optional List of classifiers to analyze. If None, then all classifiers in SimBA project are analyzed.
roi_names (Optional[List[str]]) – Optional list of ROI names to analyze. If None, then all ROI names are analyzed.
clf_time (bool) – If True, computes aggregate time of each classifier in each ROI. Deafult True.
started_bout_cnt (bool) – If True, computes started bout counts of each classifier in each ROI. Deafult True.
ended_bout_cnt (bool) – If True, computes ended bout counts of each classifier in each ROI. Deafult True.
Note
‘GitHub tutorial <https://github.com/sgoldenlab/simba/blob/master/docs/Scenario2.md#part-4–analyze-machine-results`__.
- Example
>>> analyzer = ROIClfCalculatorMultiprocess(config_path=r"D:/troubleshooting/maplight_ri/project_folder/project_config.ini", bp_names=['resident_NOSE'], clf_names=['attack'], clf_time=True, started_bout_cnt=True, ended_bout_cnt=False, bout_table=True, transpose=True, core_cnt=20) >>> analyzer.run() >>> analyzer.save()
ROI Movement Analyzer - Single Core
- class simba.roi_tools.roi_aggregate_statistics_analyzer.ROIAggregateStatisticsAnalyzer(config_path, data_path=None, threshold=0.0, body_parts=None, detailed_bout_data=False, calculate_distances=False, total_time=True, entry_counts=True, first_entry_time=False, last_entry_time=False, mean_bout_time=False, outside_rois=False, transpose=False, include_fps=False, include_video_length=False, include_px_per_mm=False, verbose=True, detailed_bout_data_save_path=None, save_path=None)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.feature_extraction_mixin.FeatureExtractionMixinAnalyzes region-of-interest (ROI) data from video tracking experiments.
This class computes various statistics related to body-part movements inside defined ROIs, including entry counts, total time spent, and bout durations.
For each video, animal/body-part and ROI (rectangle, circle or polygon), the body-part location is tested against the ROI on every frame, entry bouts are detected, and per-ROI metrics are computed:
ROI ENTRIES (COUNTS),TOTAL ROI TIME (S),MEAN ROI BOUT TIME (S),FIRST/LAST ROI ENTRY TIME (S)and, optionally,TOTAL ROI MOVEMENT (CM)/AVERAGE ROI VELOCITY (CM/S). Results are returned in long format (one row per measurement), optionally transposed to wide. Ifoutside_roisis enabled, all area not covered by any ROI is treated as a single additionalOUTSIDE REGIONS OF INTERESTzone.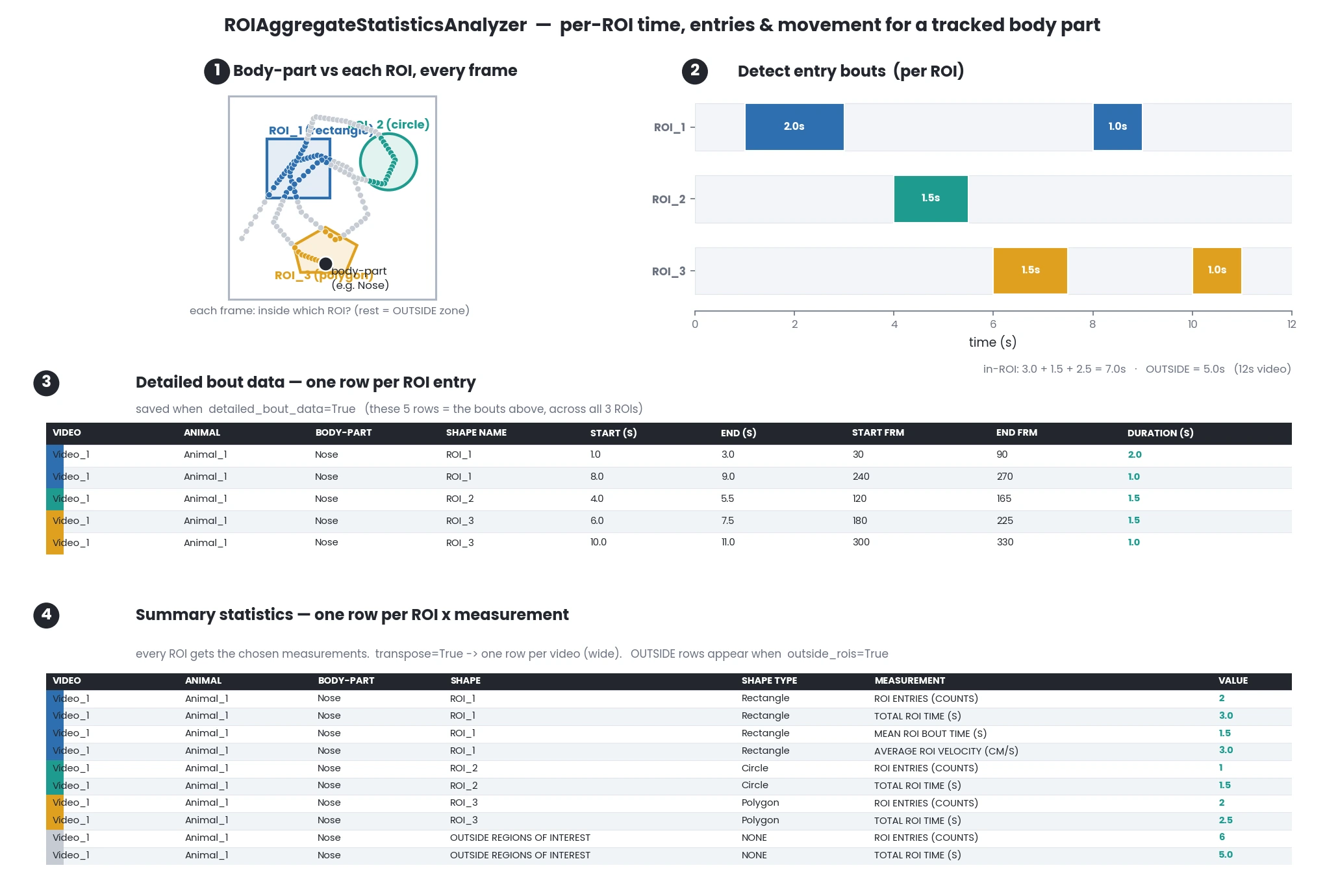
Note
For multicore process, see
simba.roi_tools.roi_aggregate_stats_mp.ROIAggregateStatisticsAnalyzerMultiprocess().- Parameters
os.PathLike) (config_path (str |) – Path to the configuration file.
optional) (save_path (str | os.PathLike,) – Path(s) to the data files.
(float) (threshold) – Probability threshold for body-part inclusion.
optional) – List of body parts to analyze.
(bool) (verbose) – Whether to compute detailed bout data.
(bool) – Whether to compute distances traveled.
(bool) – Whether to calculate total time spent in ROIs.
(bool) – Whether to count entries into ROIs.
(bool) – Whether to record the first entry time.
(bool) – If checked, SimBA will treat all areas NOT covered by a ROI drawing as a single additional ROI and compute the chosen metrics for this, single, ROI.
(bool) – Whether to record the last entry time.
(bool) – Whether to compute mean bout duration.
(bool) – Whether to transpose the final results.
(bool) – Whether to include video FPS in the results.
(bool) – Whether to include video length in the results.
(bool) – Whether to include pixel-to-millimeter conversion factor in the results.
(bool) – Whether to print verbose output during processing.
optional) – Path to save detailed bout data.
optional) – Path to save summary statistics.
- Example
>>> analyzer = ROIAggregateStatisticsAnalyzer(config_path=r"C: roubleshooting\mitra\project_folder\project_config.ini", body_parts=['Center'], first_entry_time=True, threshold=0.0, calculate_distances=True, transpose=False, detailed_bout_data=True) >>> analyzer.run() >>> analyzer.save()
ROI Movement Analyzer - Multiprocess
- class simba.roi_tools.roi_aggregate_stats_mp.ROIAggregateStatisticsAnalyzerMultiprocess(config_path, data_path=None, threshold=0.0, body_parts=None, detailed_bout_data=False, calculate_distances=False, total_time=True, entry_counts=True, first_entry_time=False, last_entry_time=False, mean_bout_time=False, outside_rois=False, transpose=False, include_fps=False, include_video_length=False, include_px_per_mm=False, verbose=True, detailed_bout_data_save_path=None, save_path=None, core_cnt=- 1)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.feature_extraction_mixin.FeatureExtractionMixinAnalyzes region-of-interest (ROI) data from video tracking experiments.
This class computes various statistics related to body-part movements inside defined ROIs, including entry counts, total time spent, and bout durations.
For each video, animal/body-part and ROI (rectangle, circle or polygon), the body-part location is tested against the ROI on every frame, entry bouts are detected, and per-ROI metrics are computed:
ROI ENTRIES (COUNTS),TOTAL ROI TIME (S),MEAN ROI BOUT TIME (S),FIRST/LAST ROI ENTRY TIME (S)and, optionally,TOTAL ROI MOVEMENT (CM)/AVERAGE ROI VELOCITY (CM/S). Results are returned in long format (one row per measurement), optionally transposed to wide. Ifoutside_roisis enabled, all area not covered by any ROI is treated as a single additionalOUTSIDE REGIONS OF INTERESTzone. This class distributes videos across multiple CPU cores.
Note
For single core process, see
simba.roi_tools.roi_aggregate_statistics_analyzer.ROIAggregateStatisticsAnalyzer()- Parameters
os.PathLike) (config_path (str |) – Path to the configuration file.
optional) (save_path (str | os.PathLike,) – Path(s) to the data files.
(float) (threshold) – Probability threshold for body-part inclusion.
optional) – List of body parts to analyze.
(bool) (transpose) – Whether to compute detailed bout data.
(bool) – Whether to compute distances traveled.
(bool) – Whether to calculate total time spent in ROIs.
(bool) – Whether to count entries into ROIs.
(bool) – Whether to record the first entry time.
(bool) – If checked, SimBA will treat all areas NOT covered by a ROI drawing as a single additional ROI and compute the chosen metrics for this, single, ROI.
(bool) – Whether to record the last entry time.
(bool) – Whether to compute mean bout duration.
(bool) – Whether to transpose the final results.
optional) – Path to save detailed bout data.
optional) – Path to save summary statistics.
- Example
>>> analyzer = ROIAggregateStatisticsAnalyzerMultiprocess(config_path=r"C:/troubleshooting/mitra/project_folder/project_config.ini", body_parts=['Center'], first_entry_time=True, threshold=0.0, calculate_distances=True, transpose=False, detailed_bout_data=True) >>> analyzer.run() >>> analyzer.save()
ROI Feature Analyzer
- class simba.roi_tools.ROI_feature_analyzer.ROIFeatureCreator(config_path, body_parts, data_path=None, append_data=False)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.feature_extraction_mixin.FeatureExtractionMixinCompute features based on the relationships between the location of the animals and the location of user-defined ROIs. This includes the distance to the ROIs, if the animals are inside the ROIs, and if the animals are directing towards the ROIs (if viable)
For every frame, body-part and ROI, three feature columns are generated:
... distance(body-part-to-ROI-centre distance in mm),... in zone(1 if the body-part is inside the ROI, else 0) and... facing(1 if the animal is directing toward the ROI, only when directionality is viable). Whenappend_data=Truethese columns are appended to thefeatures_extractedfiles for use in machine-learning models. A per-ROI summary (Average distance (mm)andTotal direction time (s)) is also written to the projectlogsdirectory.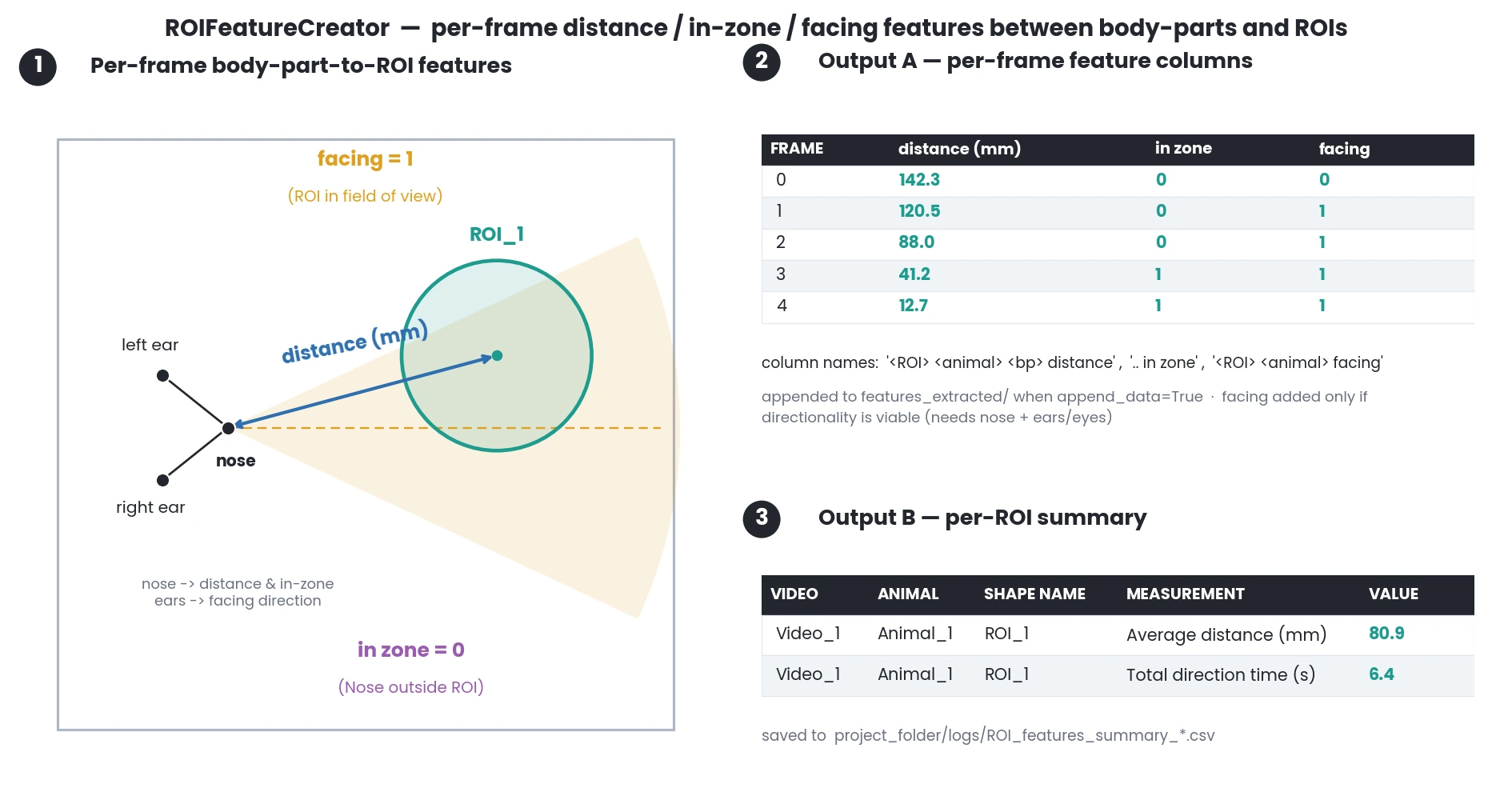
Note
- Parameters
config_path (Union[str, os.PathLike]) – Path to SimBA project config file in Configparser format.
body_parts (List[str]) – List of the body-parts to use as proxy for animal location(s).
data_path (Optional[Union[str, os.PathLike]]) – Path to folder or file holding the data used to calculate ROI aggregate statistics. If None, then defaults to the project_folder/csv/outlier_corrected_movement_location directory of the SimBA project. Default: None.
append_data (Optional[bool]) – If True, adds the features to the data in the project_folder/csv/features_extracted directory. Else, the data is held in memory.
- Example
>>> roi_featurizer = ROIFeatureCreator(config_path='/Users/simon/Desktop/envs/simba/troubleshooting/two_black_animals_14bp/project_folder/project_config.ini', body_parts=['Nose_1', 'Nose_2']) >>> roi_featurizer.run() >>> roi_featurizer.save()
>>> roi_featurizer = ROIFeatureCreator(config_path=r"C: roubleshooting\spontenous_alternation\project_folder\project_config.ini", body_parts=['nose'], data_path=r"C: roubleshooting\spontenous_alternation\project_folder\csv\outlier_corrected_movement_location\F1 HAB.csv", append_data=True) >>> roi_featurizer.run() >>> roi_featurizer.save()
ROI Directing Analyzer
- class simba.roi_tools.ROI_directing_analyzer.DirectingROIAnalyzer(config_path, data_path=None, roi_coordinates_path=None, detailed_table=True, agg_stats=True, transpose_agg_stats=False, left_ear_name=None, right_ear_name=None, nose_name=None)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.feature_extraction_mixin.FeatureExtractionMixinCompute aggregate statistics for animals directing towards ROIs.
- Parameters
config_path (str) – Path to SimBA project config file in Configparser format
data_path (Optional[Union[str, os.PathLike]]) – Path to folder or file holding the data used to calculate ROI aggregate statistics. If None, then defaults to the project_folder/csv/outlier_corrected_movement_location directory of the SimBA project. Default: None.
- Example
>>> test = DirectingROIAnalyzer(config_path='/Users/simon/Desktop/envs/simba/troubleshooting/two_black_animals_14bp/project_folder/project_config.ini') >>> test.run() >>> test.save()
ROI Time-Bin Calculator
- class simba.roi_tools.roi_time_bins_analyzer.ROITimebinAnalyzer(config_path, bin_size, data_path=None, threshold=0.0, body_parts=None, detailed_bout_data=False, calculate_distances=False, total_time=True, entry_counts=True, first_entry_time=False, last_entry_time=False, transpose=False, outside_rois=False, verbose=True, include_fps=False, include_video_length=False, include_px_per_mm=False, include_time_stamps=False, detailed_bout_data_save_path=None, save_path=None)[source]
Bases:
simba.mixins.config_reader.ConfigReaderAnalyzes region-of-interest (ROI) data from video tracking experiments conditioned on time-bin.
This class computes various statistics related to body-part movements inside defined ROIs, including entry counts, total time spent, and bout durations.
The video is divided into consecutive fixed-length time bins (
bin_sizeseconds), and the per-ROI metrics (TOTAL ROI TIME (S),ROI ENTRIES (COUNTS),FIRST/LAST ROI ENTRY TIME (S)and, optionally,TOTAL ROI MOVEMENT (CM)/AVERAGE ROI VELOCITY (CM/S)) are reported separately for each time bin. An ROI bout that spans a bin boundary has its time split across the bins, while its entry is counted in the bin where it starts. Results are returned in long format (one row per ROI x time-bin x measure), optionally transposed to wide; ifoutside_roisis enabled, all area not covered by any ROI is treated as an additionalOUTSIDE REGIONS OF INTERESTzone.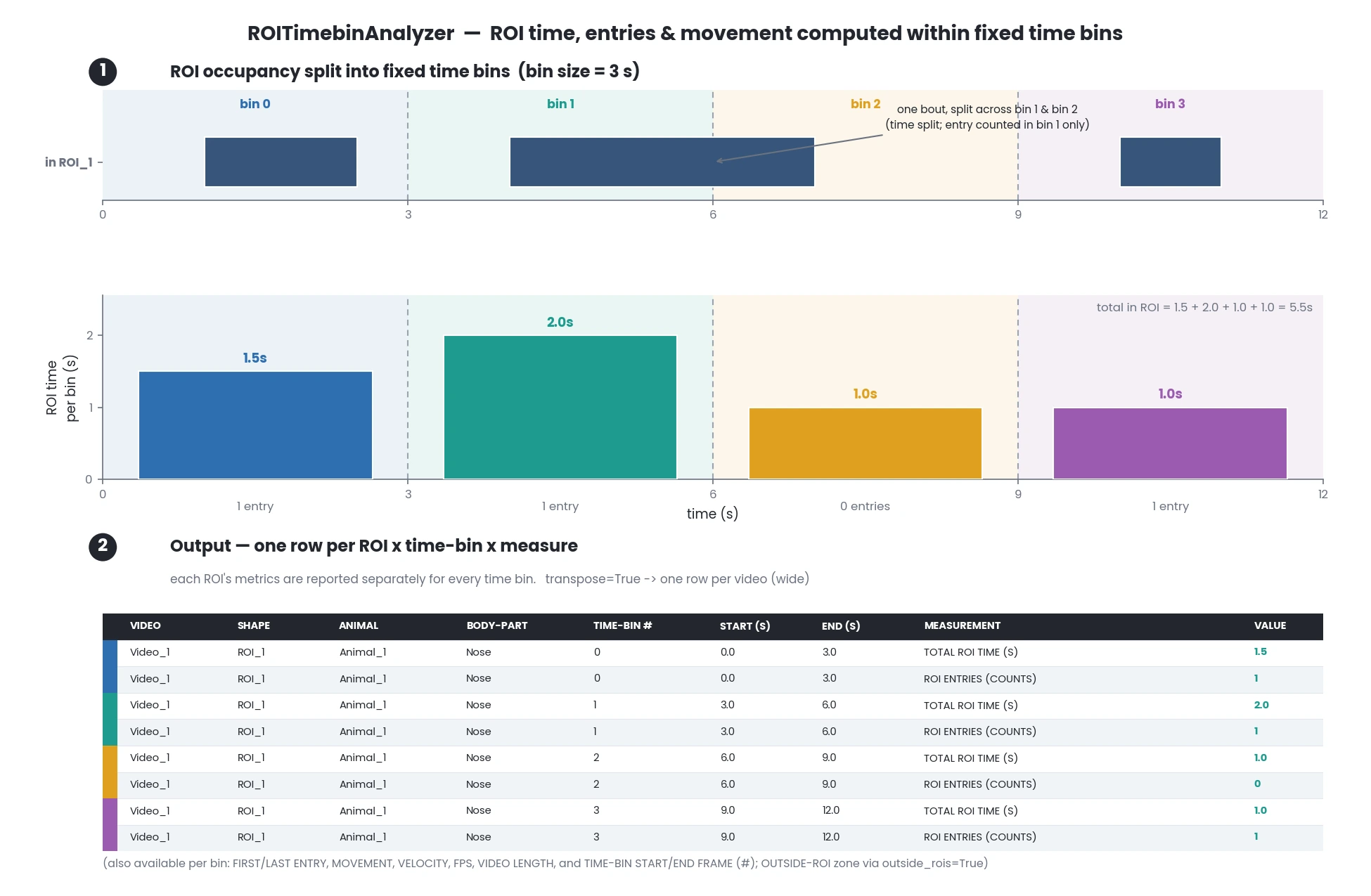
See also
For ROI statistics over the whole session (no time bins), see
simba.roi_tools.roi_aggregate_statistics_analyzer.ROIAggregateStatisticsAnalyzer().- Parameters
os.PathLike) (config_path (str |) – Path to the configuration file.
optional) (save_path (str | os.PathLike,) – Path(s) to the data files.
(float) (threshold) – Probability threshold for body-part inclusion.
optional) – List of body parts to analyze.
(bool) (transpose) – Whether to compute detailed bout data.
(bool) – Whether to compute distances traveled.
(bool) – Whether to calculate total time spent in ROIs.
(bool) – Whether to count entries into ROIs.
(bool) – Whether to record the first entry time.
(bool) – Whether to include time bin start times, start frame, end time and end frame in output.
(bool) – If checked, SimBA will treat all areas NOT covered by a ROI drawing as a single additional ROI and compute the chosen metrics for this, single, ROI.
(bool) – Whether to record the last entry time.
(bool) – Whether to transpose the final results.
optional) – Path to save detailed bout data.
optional) – Path to save summary statistics.
- Example
>>> test = ROITimebinAnalyzer(config_path=r"C: roubleshooting\mitra\project_folder\project_config.ini", bin_size=61, body_parts=['Nose'], detailed_bout_data=True, calculate_distances=True, transpose=True) >>> test.run() >>> test.save()
ROI Time-Bin Calculator (Legacy)
- class simba.roi_tools.ROI_time_bin_calculator.ROITimebinCalculator(config_path, bin_length, body_parts, data_path=None, threshold=0.0, movement=False)[source]
Bases:
simba.mixins.config_reader.ConfigReaderCompute how much time and how many entries animals are making into user-defined ROIs within user-defined time bins. Also compute the average velocity and distance moved within user-defined ROIs split by time-bins.
Results are stored in the
project_folder/logsdirectory of the SimBA project.- Parameters
config_path (Union[str, os.PathLike]) – path to SimBA project config file in Configparser format
bin_length (float) – length of time bins in seconds.
body_parts (List[str]) – List of body-parts to use as proxy of animal locations.
threshold (float) – Filter pose-estimation data detected below defined threshold.
movement (Optional[bool]) – If True, compute the distances and velocities within time-bins. Default False.
Important
Legacy. Use
simba.roi_tools.roi_time_bins_analyzer.ROITimebinAnalyzer().Note
Example anticipated ROI time-bins entry results. Example anticipated ROI time-bins latency results. Example anticipated movement results.
- Example
>>> calculator = ROITimebinCalculator(config_path=r"/Users/simon/Desktop/envs/simba/troubleshooting/two_black_animals_14bp/project_folder/project_config.ini", bin_length=1.0, body_parts=['Nose_1'], threshold=0.00, movement=True) >>> calculator.run() >>> calculator.save()
ROI Size Standardizer
- class simba.roi_tools.ROI_size_standardizer.ROISizeStandardizer(config_path, reference_video)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.feature_extraction_mixin.FeatureExtractionMixinStandardize ROI sizes according to a reference video.
Note
Example: You select a “baseline” video, say that this baseline video has a pixel per millimeter of 10. Say there are a further two videos in the project with ROIs, and these videos has pixels per millimeter of 9 and 11. At runtime, the area of the rectangles, circles and polygons in the two additional videos get their ROI areas increased/decreased with 10% while the baseline video ROIs are unchanged.
Note
See ROI tutorial on GitHub or `ReadTheDocs https://simba-uw-tf-dev.readthedocs.io/en/latest/tutorials_rst/roi_tutorial_new_2025.html>`_
- Parameters
- Example
>>> test = ROISizeStandardizer(config_path='/Users/simon/Desktop/envs/troubleshooting/DLC_2_Black_animals/project_folder/project_config.ini', reference_video='Together_1') >>> test.run() >>> test.save()
ROI Visualization
ROI Plotter - Single Core
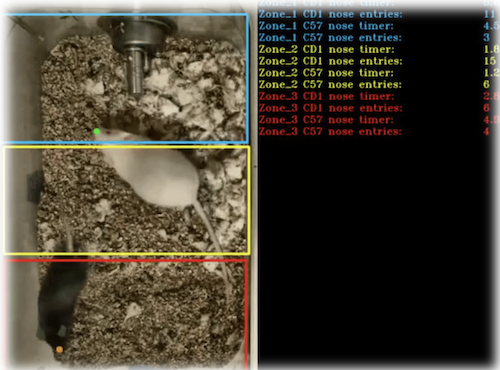
- class simba.plotting.roi_plotter.ROIPlotter(config_path, video_path, body_parts, outside_roi=False, threshold=0.0, verbose=True, show_animal_name=False, show_body_part=True, show_bbox=False, data_path=None, save_path=None, bp_colors=None, bp_sizes=None, border_bg_clr=(0, 0, 0))[source]
Bases:
simba.mixins.config_reader.ConfigReaderVisualize the ROI data (number of entries/exits, time-spent in ROIs etc).
Note
See also
Use
simba.plotting.ROI_plotter_mp.ROIPlotMultiprocess()for improved run-time.
- param Union[str, os.PathLike] config_path
Path to SimBA project config file in Configparser format.
- param Union[str, os.PathLike] video_path
Path to video file to create ROI visualizations for.
- param List[str] body_parts
List of the body-parts to use as proxy for animal locations.
- param bool outside_roi
If True, SimBA will treat all areas NOT covered by a ROI drawing as a single additional ROI and visualize the stats for this single ROI. Default: False.
- param float threshold
Float between 0 and 1. Body-part locations detected below this confidence threshold are filtered. Default: 0.0.
- param Optional[bool] verbose
If True, print progress messages during video creation. Default: True.
- param bool show_animal_name
If True, display animal names on the video frames. Default: False.
- param bool show_body_part
If True, display body-part locations as circles on the video frames. Default: True.
- param Optional[Union[str, os.PathLike]] data_path
Optional path to the pose-estimation data. If None, then locates file in
outlier_corrected_movement_locationdirectory. Default: None.- param Optional[Union[str, os.PathLike]] save_path
Optional path to where to save video. If None, then saves it in
frames/output/roi_analysisdirectory of SimBA project. Default: None.- param Optional[List[Tuple[int, int, int]]] bp_colors
Optional list of tuples of same length as body_parts representing the colors of the body-parts in RGB format. Defaults to None and colors are automatically chosen. Default: None.
- param Optional[List[Union[int]]] bp_sizes
Optional list of integers representing the sizes of the pose estimated body-part location circles. Defaults to None and size is automatically inferred. Default: None.
- param Tuple[int, int, int] border_bg_clr
RGB tuple representing the background color of the border area where statistics are displayed. Default: (0, 0, 0).
- example
>>> test = ROIPlotter(config_path=r'/Users/simon/Desktop/envs/simba/troubleshooting/mouse_open_field/project_folder/project_config.ini', >>> video_path="/Users/simon/Desktop/envs/simba/troubleshooting/mouse_open_field/project_folder/videos/SI_DAY3_308_CD1_PRESENT.mp4", >>> body_parts=['Nose'], >>> show_body_part=True, >>> show_animal_name=True) >>> test.run()
- example II
>>> test = ROIPlotter(config_path=r"C: roubleshooting\mitra\project_folder\project_config.ini", >>> video_path=r"C: roubleshooting\mitra\project_folder
- ideosŁ_MA142_Gi_Saline_0513.mp4”,
>>> body_parts=['Nose'], >>> show_body_part=True, >>> show_animal_name=False) >>> test.run()
ROI Plotter - Multiprocess
- class simba.plotting.roi_plotter_mp.ROIPlotMultiprocess(config_path, video_path, body_parts, threshold=0.0, core_cnt=- 1, verbose=True, outside_roi=False, show_body_part=True, font=None, show_animal_name=False, bbox=None, print_timer='seconds', border_bg_clr=(0, 0, 0), data_path=None, save_path=None, bp_colors=None, bp_sizes=None, gpu=False)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.plotting_mixin.PlottingMixinVisualize the ROI data (number of entries/exits, time-spent in ROIs) using multiprocessing for improved performance.
Note
- Parameters
config_path (Union[str, os.PathLike]) – Path to SimBA project config file in Configparser format.
video_path (Union[str, os.PathLike]) – Path to video file to create ROI visualizations for.
body_parts (List[str]) – List of the body-parts to use as proxy for animal locations.
threshold (float) – Float between 0 and 1. Body-part locations detected below this confidence threshold are filtered. Default: 0.0.
core_cnt (int) – Number of cores to use for multiprocessing. Default: -1 (uses all available cores).
verbose (bool) – If True, print progress messages during video creation. Default: True.
outside_roi (bool) – If True, SimBA will treat all areas NOT covered by a ROI drawing as a single additional ROI and visualize the stats for this single ROI. Default: False.
show_body_part (bool) – If True, display body-part locations as circles on the video frames. Default: True.
show_animal_name (bool) – If True, display animal names on the video frames. Default: False.
bbox (Optional[Literal['axis-aligned', 'animal-aligned']]) – If not None, draw bounding boxes around each animal.
'axis-aligned'= rectangle aligned with video axes;'animal-aligned'= minimum rotated rectangle aligned with the animal’s orientation. Default: None (no bounding boxes).print_timer (Literal['seconds', 'hh:mm:ss.ssss']) – Timer format for behavior/ROI counters shown in the border panel.
'seconds'= numeric seconds,'hh:mm:ss.ssss'= clock-style timestamp with fractional seconds. Default:'seconds'.border_bg_clr (Tuple[int, int, int]) – RGB tuple representing the background color of the border area where statistics are displayed. Default: (0, 0, 0).
data_path (Optional[Union[str, os.PathLike]]) – Optional path to the pose-estimation data. If None, then locates file in
outlier_corrected_movement_locationdirectory. Default: None.save_path (Optional[Union[str, os.PathLike]]) – Optional path to where to save video. If None, then saves it in
frames/output/roi_analysisdirectory of SimBA project. Default: None.bp_colors (Optional[List[Tuple[int, int, int]]]) – Optional list of tuples of same length as body_parts representing the colors of the body-parts in RGB format. Defaults to None and colors are automatically chosen. Default: None.
bp_sizes (Optional[List[Union[int]]]) – Optional list of integers representing the sizes of the pose estimated body-part location circles. Defaults to None and size is automatically inferred. Default: None.
gpu (bool) – If True, use GPU acceleration for video concatenation. Default: False.
- Example
>>> test = ROIPlotMultiprocess(config_path=r'/Users/simon/Desktop/envs/simba/troubleshooting/mouse_open_field/project_folder/project_config.ini', >>> video_path="/Users/simon/Desktop/envs/simba/troubleshooting/mouse_open_field/project_folder/videos/SI_DAY3_308_CD1_PRESENT.mp4", >>> core_cnt=7, >>> body_parts=['Nose'], >>> show_body_part=True, >>> show_animal_name=False) >>> test.run()
ROI Feature Visualizer - Single Core
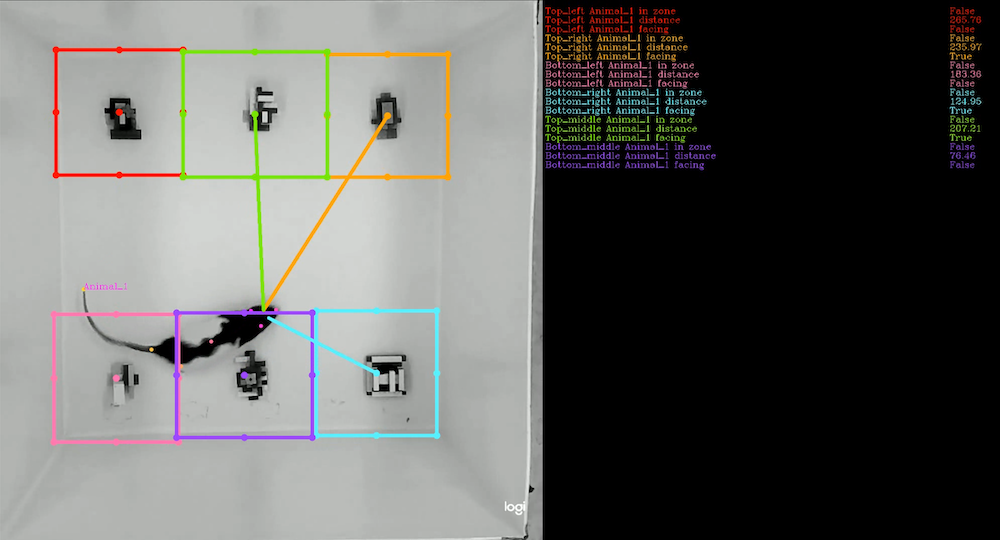
- class simba.plotting.ROI_feature_visualizer.ROIfeatureVisualizer(config_path, video_path, body_parts, style_attr)[source]
Bases:
simba.mixins.config_reader.ConfigReaderVisualizing features that depend on the relationships between the location of the animals and user-defined ROIs. E.g., distances to centroids of ROIs, if animals are directing towards ROIs, and if animals are within ROIs.
Note
For improved run-time, see
simba.ROI_feature_visualizer_mp.ROIfeatureVisualizerMultiprocess()for multiprocess class. Tutorials.

- Parameters
config_path (Union[str, os.PathLike]) – Path to SimBA project config file in Configparser format
video_path (Union[str, os.PathLike]) – Path to video file to overlay ROI features on.
body_parts (List[str]) – List of body-parts to use as proxy for animal location(s).
style_attr (Dict[str, Any]) – User-defined styles (sizes, colors etc.)
- Example
>>> style_attr = {'roi_centers': True, 'roi_ear_tags': True, 'directionality': True, 'directionality_style': 'funnel', 'border_color': (0, 0, 0), 'pose_estimation': True, 'animal_names': True} >>> test = ROIfeatureVisualizer(config_path='/Users/simon/Desktop/envs/simba/troubleshooting/RAT_NOR/project_folder/project_config.ini', video_path='/Users/simon/Desktop/envs/simba/troubleshooting/RAT_NOR/project_folder/videos/2022-06-20_NOB_DOT_4.mp4', style_attr=style_attr, body_parts=['Nose']) >>> test.run()
ROI Feature Visualizer - Multiprocess
- class simba.plotting.ROI_feature_visualizer_mp.ROIfeatureVisualizerMultiprocess(config_path, video_path, body_parts, show_roi_centers=True, show_roi_eartags=False, show_animal_names=False, font=None, border_bg_clr=(0, 0, 0), direction=None, time_slice=None, bbox=None, roi_coordinates_path=None, show_pose=True, core_cnt=- 1, gpu=False)[source]
Bases:
simba.mixins.config_reader.ConfigReaderVisualize features that depend on the relationships between the location of the animals and user-defined ROIs. E.g., distances to centroids of ROIs, cumulative time spent in ROIs, if animals are directing towards ROIs etc. Uses multiprocessing for faster rendering.
- Parameters
config_path (Union[str, os.PathLike]) – Path to SimBA project config file in Configparser format.
video_path (Union[str, os.PathLike]) – Path to video file to overlay ROI features on.
body_parts (List[str]) – List of body-parts to use as proxy for animal location(s). One per animal.
show_roi_centers (bool) – If True, draw the center point of each ROI on the video. Default True.
show_roi_eartags (bool) – If True, draw ear-tag labels on ROI shapes. Default False.
show_animal_names (bool) – If True, display animal names on the video. Default False.
font (Optional[str]) – Name of a SimBA-bundled font (in
simba/assets/fonts, e.g.'Poppins Regular') used for the ROI feature text drawn in the border panel. If None, a default cv2 font is used. Default None.border_bg_clr (Tuple[int, int, int]) – RGB tuple for the background color of the border panel where ROI stats are shown. Default (0, 0, 0).
direction (Optional[Literal['funnel', 'lines']]) – If not None, draw directionality (animal directing towards ROI).
'funnel'or'lines'style. Default None (no directionality).time_slice (Optional[Dict[str, str]]) – Optional time window to render, given as
{'start_time': 'HH:MM:SS', 'end_time': 'HH:MM:SS'}. If None, the full video is rendered. Default None.bbox (Optional[Literal['axis-aligned', 'animal-aligned']]) – If not None, draw bounding boxes around each animal.
'axis-aligned'= rectangle aligned with video axes;'animal-aligned'= minimum rotated rectangle. Default None (no bounding boxes).roi_coordinates_path (Optional[Union[str, os.PathLike]]) – Optional path to ROI definitions file. If None, uses project default from config. Default None.
show_pose (bool) – If True, draw pose-estimation keypoints (circles) on the video. Default True.
core_cnt (int) – Number of CPU cores for multiprocessing. -1 uses all available. Default -1.
gpu (bool) – If True, use GPU for video concatenation when available. Default False.
Note
Tutorials. See
simba.ROI_feature_visualizer.ROIfeatureVisualizer()for single process class. Would be slower but potentially more reliable.
- Example
>>> test = ROIfeatureVisualizerMultiprocess(config_path='/Users/simon/Desktop/envs/simba/troubleshooting/spontenous_alternation/project_folder/project_config.ini', ... video_path='/Users/simon/Desktop/envs/simba/troubleshooting/spontenous_alternation/project_folder/videos/NOR ENCODING FExMP8.mp4', ... body_parts=['Center'], ... show_roi_centers=True, ... show_roi_eartags=False, ... direction='funnel', ... show_pose=True, ... show_animal_names=True, ... font='Poppins Regular', ... core_cnt=-1) >>> test.run()
ROI Directing Visualizer
- class simba.plotting.roi_directing_visualizer.DirectingROIVisualizer(config_path, video_path, direction_style='lines', direction_color=(0, 0, 255), direction_thickness=None, circle_size=None, show_pose=True, show_roi_centers=True, show_animal_names=False, border_bg_clr=(0, 0, 0), time_slice=None, roi_coordinates_path=None, left_ear_name=None, right_ear_name=None, nose_name=None, core_cnt=- 1, gpu=False, verbose=True)[source]
Bases:
simba.mixins.config_reader.ConfigReader,simba.mixins.plotting_mixin.PlottingMixinVisualize when animals are directing towards ROIs. Draws the ROIs on the video frames, overlays pose-estimation body-parts, and draws directing lines (funnel or line style) from the animal eye midpoint to the ROI when the animal is directing towards the ROI. A text panel shows the directing boolean for each animal-ROI combination per frame. Uses multiprocessing.
- Parameters
config_path (Union[str, os.PathLike]) – Path to SimBA project config file in Configparser format.
video_path (Union[str, os.PathLike]) – Path to video file to overlay directing visualization on.
direction_style (Literal['funnel', 'lines']) – Style of direction line. Default ‘funnel’.
direction_color (Tuple[int, int, int]) – BGR color of the directing line. Default (0, 0, 255) (red).
direction_thickness (Optional[int]) – Thickness of the directing line (used for ‘lines’ style). If None, computed automatically based on video resolution. Default None.
circle_size (Optional[int]) – Size of the pose-estimation keypoint circles. If None, computed automatically based on video resolution. Default None.
show_pose (bool) – If True, draw pose-estimation keypoints on the video. Default True.
show_roi_centers (bool) – If True, draw the center of each ROI. Default True.
show_animal_names (bool) – If True, display animal names on the video. Default False.
border_bg_clr (Tuple[int, int, int]) – BGR color for the text panel background. Default (0, 0, 0).
time_slice (Optional[Dict[str, str]]) – Optional dict with ‘start_time’ and ‘end_time’ keys (HH:MM:SS format) to visualize a sub-clip. Default None.
roi_coordinates_path (Optional[Union[str, os.PathLike]]) – Optional path to ROI definitions file. If None, uses the project default. Default None.
left_ear_name (Optional[str]) – Optional custom left ear body-part name. Default None.
right_ear_name (Optional[str]) – Optional custom right ear body-part name. Default None.
nose_name (Optional[str]) – Optional custom nose body-part name. Default None.
core_cnt (int) – Number of CPU cores for multiprocessing. -1 uses all available. Default -1.
gpu (bool) – If True, use GPU for video concatenation when available. Default False.
verbose (bool) – If True, print progress messages during visualization. Default True.
- Example
>>> viz = DirectingROIVisualizer(config_path='/path/to/project_config.ini', ... video_path='/path/to/video.mp4', ... direction_style='funnel', ... show_pose=True, ... core_cnt=4) >>> viz.run()
ROI GUI Tools
ROI GUI
- class simba.roi_tools.roi_ui.ROI_ui(video_path, config_path=None, roi_coordinates_path=None, pose_path=None, video_dir=None, roi_table_popup=None)[source]
Bases:
simba.roi_tools.roi_ui_mixin.ROI_mixin,simba.mixins.config_reader.ConfigReaderMain entry-point for drawing ROIs on videos.
Note
See ROI tutorial on GitHub or ReadTheDocs
- param Union[str, os.PathLike] video_path
Path to the video file to draw ROIs on.
- param Optional[Union[str, os.PathLike]] config_path
Path to the SimBA project config INI file. If None, then
roi_coordinates_pathandvideo_dirmust be provided.- param Optional[Union[str, os.PathLike]] roi_coordinates_path
Path to an existing ROI definitions HDF5 file. Used when
config_pathis None.- param Optional[Union[str, os.PathLike]] pose_path
Path to pose-estimation data file. If provided, pose landmarks are overlaid on the video frame in the ROI interface.
- param Optional[Union[str, os.PathLike]] video_dir
Directory containing project videos. Used to enable copying ROIs from other videos. Required when
config_pathis None.- param Optional[Any] roi_table_popup
Reference to the parent ROI table popup window. If provided,
refresh_window()is called on close.- example
>>> ROI_ui(config_path=r"C: roubleshooting\mouse_open_field\project_folder\project_config.ini", video_path=r"C: roubleshooting\mouse_open_field\project_folder
- ideosVideo1.mp4”)
>>> ROI_ui(config_path=r"/mnt/c/troubleshooting/mouse_open_field/project_folder/project_config.ini", video_path=r"/mnt/c/troubleshooting/mouse_open_field/project_folder/videos/Video1.mp4")
ROI GUI Mixin
ROI Ruler
- class simba.roi_tools.roi_ruler.ROIRuler(img_window, thickness=None, second_thickness=None, clr=None, second_clr=None, tolerance=10, px_per_mm=None, info_label=None, img_scale_factor=1.0)[source]
Bases:
objectInteractive Tkinter-based ruler tool for measuring distances on ROI images.
- Parameters
img_window (Toplevel) – Tkinter Toplevel window containing an image label named ‘img_lbl’.
thickness (Optional[int]) – Thickness of the main line in pixels. If None, automatically calculated based on image size using optimal circle size ratio. Default None.
second_thickness (Optional[int]) – Thickness of the outline line in pixels. If None, set to 2x the main line thickness. Default None.
clr (Optional[Tuple[int, int, int]]) – RGB color tuple (R, G, B) for the main line. If None, uses default text color from TextOptions. Default None.
second_clr (Optional[Tuple[int, int, int]]) – RGB color tuple (R, G, B) for the outline line. If None, no outline is drawn. Default None.
tolerance (int) – Maximum distance in pixels from a line endpoint to detect a click for moving it. Also minimum line length required to register the line. Default 10.
px_per_mm (Optional[float]) – Pixels per millimeter conversion factor. If provided, calculates line length in millimeters. Must be > 0. Default None.
info_label (Optional[SimBALabel]) – Optional Tkinter label to display line length information. If provided, automatically updates with “RULER LENGTH: X mm, Y pixels” when line is drawn. Default None.
ROI GUI Utils
- simba.roi_tools.roi_utils.create_circle_entry(circle_selector, video_name, shape_name, clr_name, clr_bgr, thickness, ear_tag_size, px_conversion_factor)[source]
- simba.roi_tools.roi_utils.create_polygon_entry(polygon_selector, video_name, shape_name, clr_name, clr_bgr, thickness, ear_tag_size, px_conversion_factor)[source]
- simba.roi_tools.roi_utils.create_rectangle_entry(rectangle_selector, video_name, shape_name, clr_name, clr_bgr, thickness, ear_tag_size, px_conversion_factor)[source]
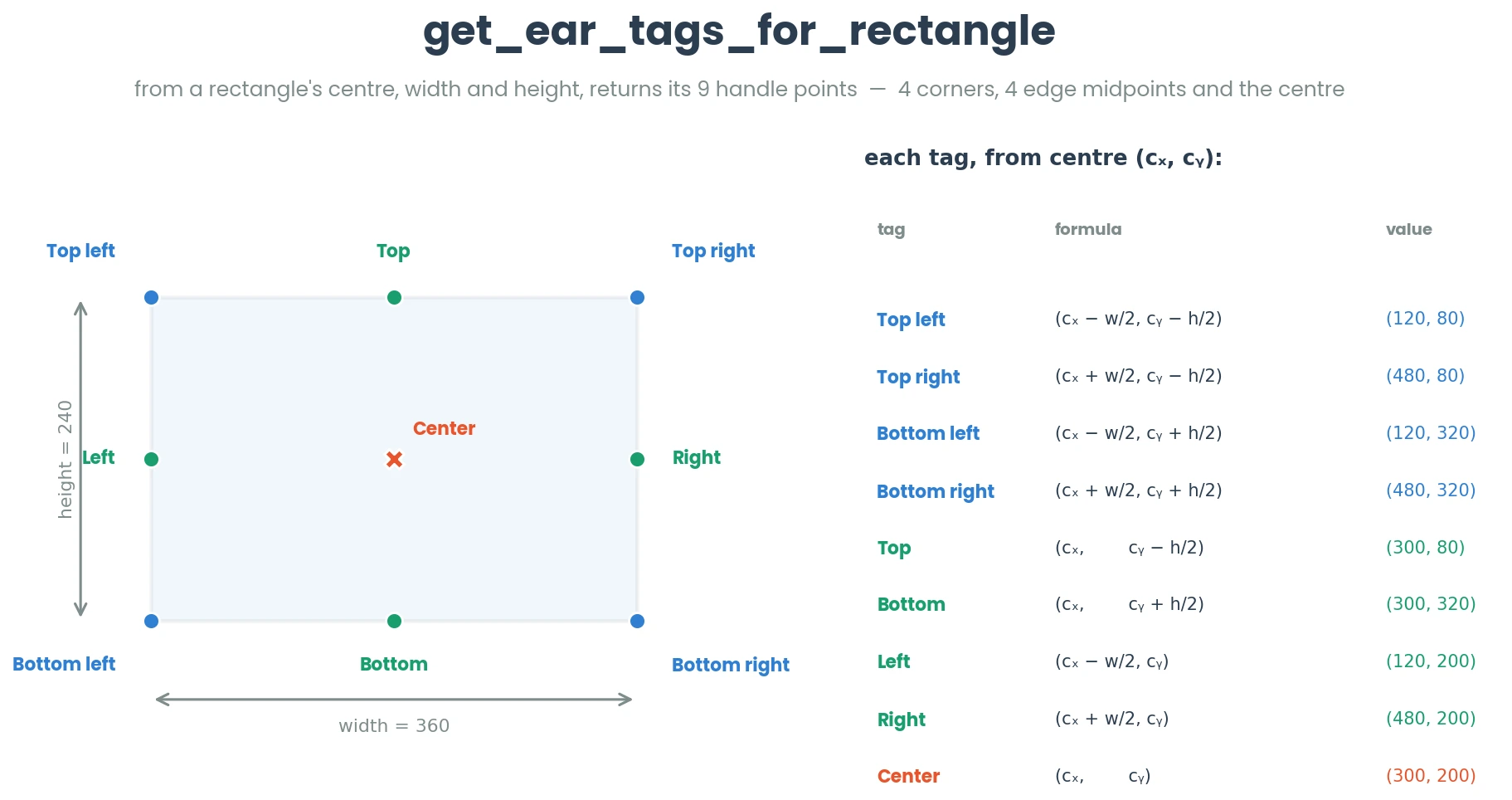
- simba.roi_tools.roi_utils.get_ear_tags_for_rectangle(center, width, height)[source]
Knowing the center, width, and height of rectangle, return its vertices.
- Parameters
- Returns
Dictionary holding the name of the tag as key and coordinates as value.
- Return type
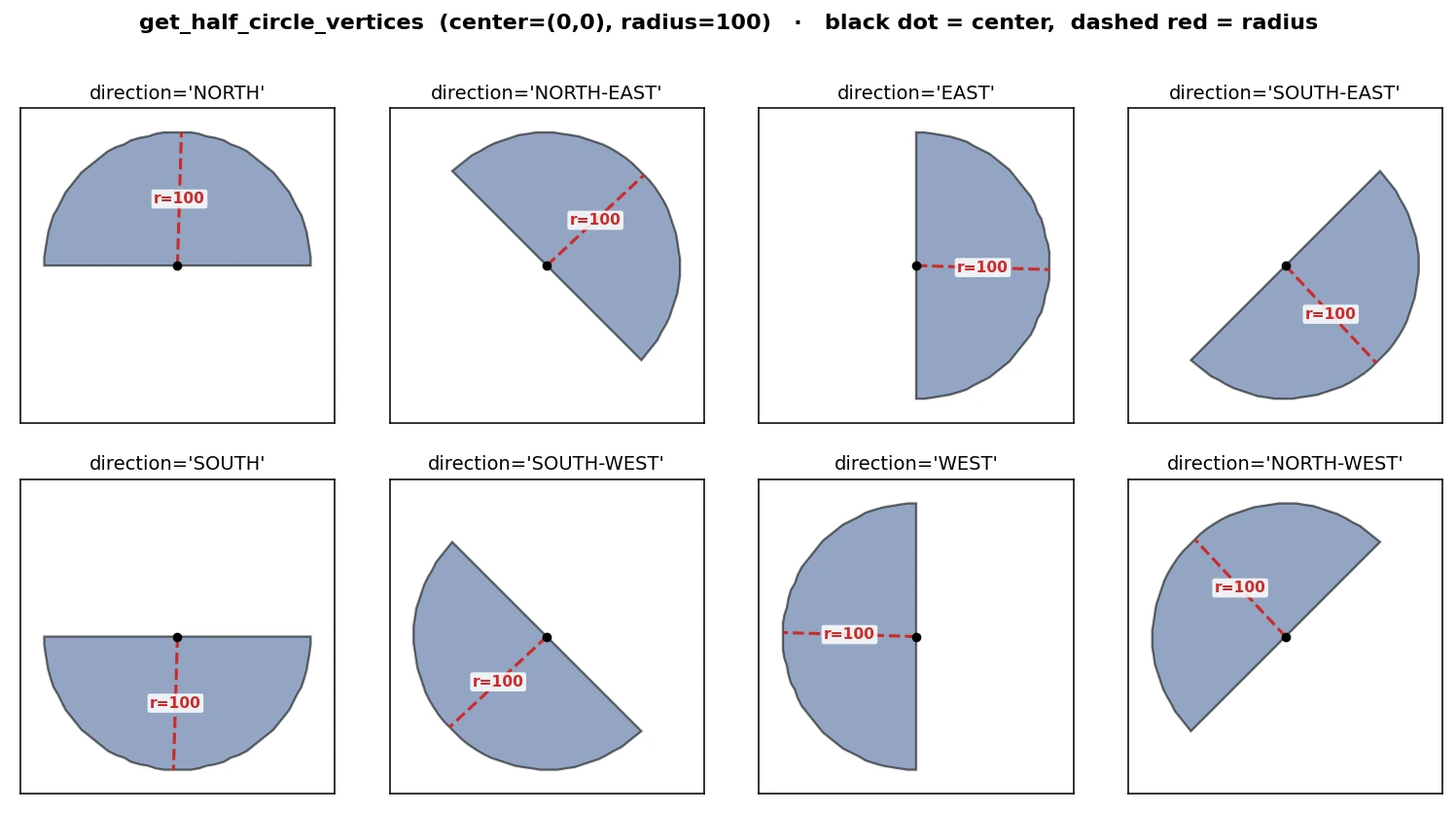
- simba.roi_tools.roi_utils.get_half_circle_vertices(center, radius, direction, n_points=50)[source]
Generates vertices for a half-circle with a given radius and direction, centered at a specific point.
- Parameters
center (Tuple[int, int]) – A tuple (x, y) representing the center coordinates of the half-circle. Must contain exactly two numeric values.
radius (int) – The radius of the half-circle. Must be a positive integer.
direction (Literal['NORTH', 'SOUTH', 'WEST', 'EAST', 'NORTH-EAST', 'NORTH-WEST', 'SOUTH-EAST', 'SOUTH-WEST']) – The direction in which the half-circle is oriented (the side the curved arc faces).
n_points (Optional[int]) – The number of vertices used to approximate the half-circle. Defaults to 50.
- Returns
A tuple containing vertices as array and dict.
- Return type
- simba.roi_tools.roi_utils.get_image_from_label(tk_lbl)[source]
Given a tkinter label with an image, retrieve image in array format
- simba.roi_tools.roi_utils.get_roi_data(roi_path, video_name)[source]
Helper to read in ROI data from disk
- simba.roi_tools.roi_utils.get_roi_df_from_dict(roi_dict, video_name_nesting=False)[source]
Helper create DataFrames from a shape dictionary.
If nesting is True, then the roi_dict has video name, and shape name keys.
- simba.roi_tools.roi_utils.get_roi_dict_from_dfs(rectangle_df, circle_df, polygon_df, video_name_nesting=False)[source]
Helper create dict from a shape dataframes.
- simba.roi_tools.roi_utils.get_triangle_vertices(center, side_length, direction)[source]
Find equilateral triangle vertices knowing the center, direction and length side.
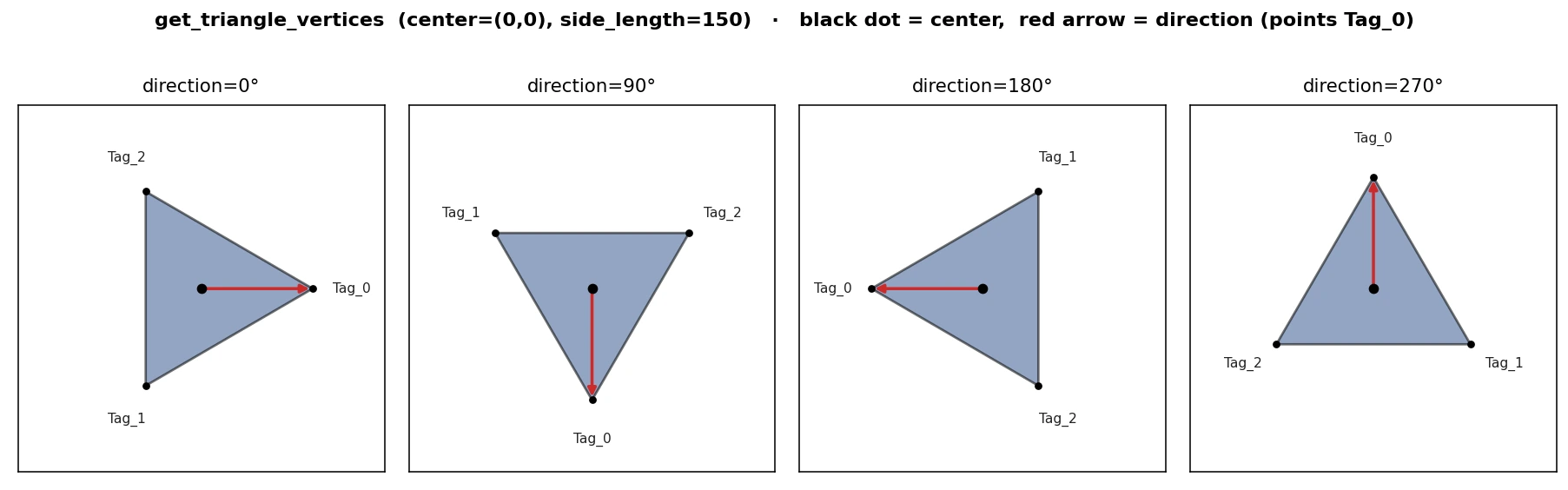
- Parameters
- Returns
2-part tuple containing vertices as array and dict.
- Return type
- simba.roi_tools.roi_utils.get_vertices_hexagon(center, radius)[source]
Generates the vertices of a regular hexagon centered at a given point with a specified radius.
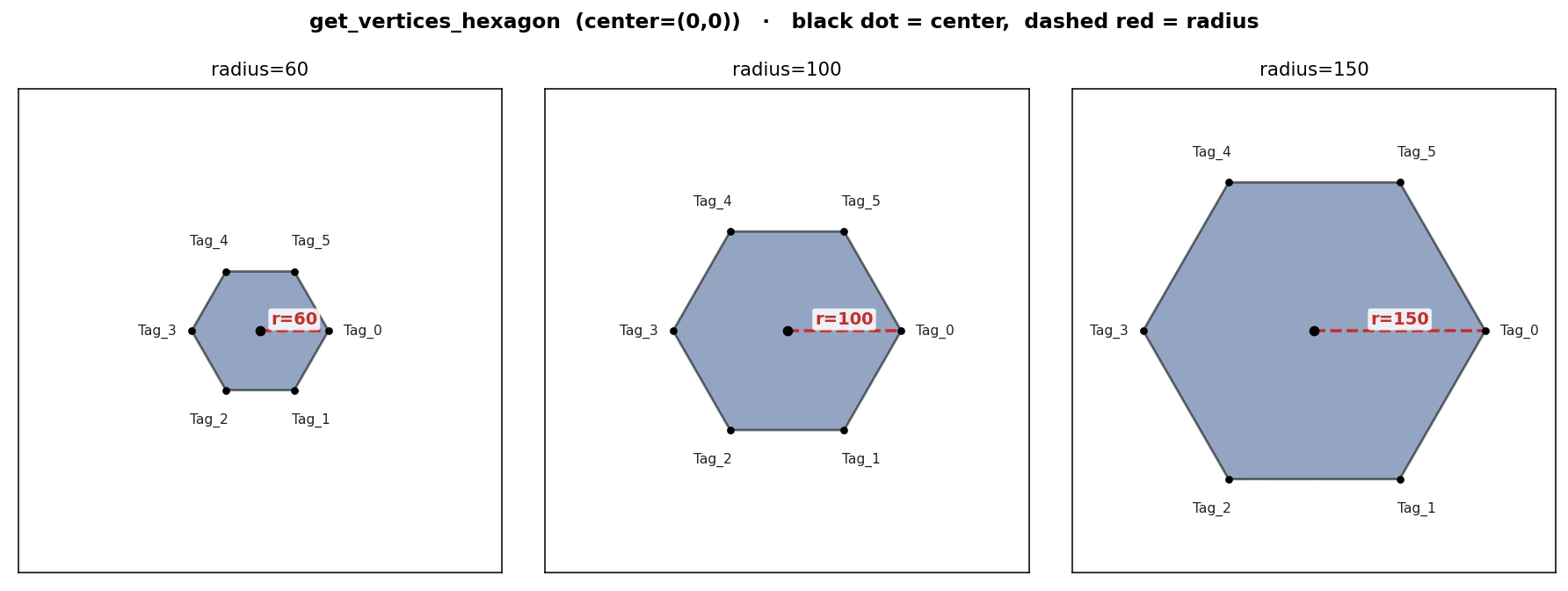
- Parameters
- Returns
A tuple containing vertices as array and dict.
- Return type
- simba.roi_tools.roi_utils.insert_gridlines_on_roi_img(img, grid, color, thickness)[source]
Draw the outlines of a set of grid polygons onto an image.
Each polygon’s exterior is drawn as a closed polyline; useful for overlaying a tiling grid on an ROI frame.
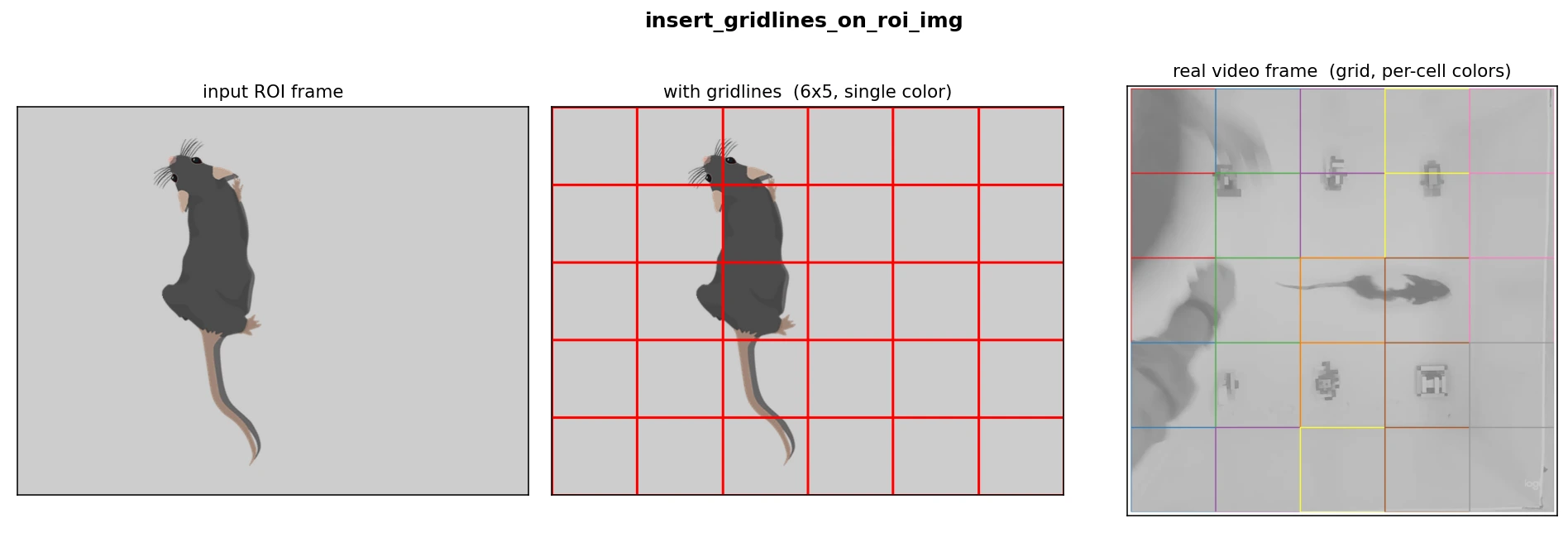
- Parameters
img (np.ndarray) – The image to draw on, as a (height, width, 3) BGR array.
grid (List[Polygon]) – A list of Shapely polygons whose exteriors are drawn. If
Noneor empty, the image is returned unchanged.color (Tuple[int, int, int]) – The BGR color of the gridlines.
thickness (int) – The line thickness in pixels.
- Returns
The image with the gridlines drawn on it.
- Return type
np.ndarray
- simba.roi_tools.roi_utils.multiply_ROIs(filename, config_path=None, roi_coordinates_path=None, videos_dir=None)[source]
Reproduce ROIs in one video to all other videos in SimBA project.
- param Union[str, os.PathLike] config_path
Path to SimBA project config file.
- param Union[str, os.PathLike] filename
Path to video in project for which ROIs should be duplicated in the other videos in the project
- return
None. The results are stored in the
/project_folder/logs/measures\ROI_definitions.h5of the SimBA project- example
>>> multiply_ROIs(config_path=r"C: roubleshooting\mitra\project_folder\project_config.ini", filename=r"C: roubleshooting\mitra\project_folder
ideosŁ_MA142_Gi_CNO_0514.mp4”)
- simba.roi_tools.roi_utils.reset_video_ROIs(config_path, filename)[source]
Delete drawn ROIs for a single video in a SimBA project.
- param Union[str, os.PathLike] config_path
Path to SimBA project config file.
- param Union[str, os.PathLike] filename
Path to video in project for which ROIs should be duplicated in the other videos in the project
- return
None. The results are stored in the
/project_folder/logs/measures\ROI_definitions.h5of the SimBA project- example
>>> reset_video_ROIs(config_path=r"C: roubleshooting\mitra\project_folder\project_config.ini", filename=r"C: roubleshooting\mitra\project_folder
ideosŁ_MA142_Gi_CNO_0514.mp4”)
ROI Shape Selectors
ROI Circle Selector
- class simba.roi_tools.roi_selector_circle_tkinter.ROISelectorCircle(img_window, thickness=10, clr=(147, 20, 255))[source]
Bases:
objectA class to allow users to interactively select a Region of Interest (ROI) circle from an image displayed in a Tkinter window.
See also
For OpenCV based method, see
simba.video_processors.roi_selector_circle.ROISelectorCircle()
ROI Polygon Selector
- class simba.roi_tools.roi_selector_polygon_tkinter.ROISelectorPolygon(img_window, thickness=10, vertice_size=2, clr=(147, 20, 255), tolerance=2)[source]
Bases:
objectClass for selecting a polygonal region of interest (ROI) within an image or video frame. The selected region vertices are stored in self: polygon_vertices.
See also
For OpenCV based method, see
simba.video_processors.roi_selector_polygon.ROISelectorPolygon()
ROI Rectangle Selector (Tkinter)
- class simba.roi_tools.roi_selector_rectangle_tkinter.ROISelector(img_window, thickness=10, clr=(147, 20, 255))[source]
Bases:
objectA class to allow users to interactively select a Region of Interest (ROI) rectangle from an image displayed in a Tkinter window.
See also
For OpenCV based method, see
simba.video_processors.roi_selector.ROISelector()
ROI Interactive Bufferer
- class simba.roi_tools.interactive_roi_bufferer.InteractiveROIBufferer(img_window, original_img, roi_dict, buffer_mm, px_per_mm, settings=None, hex_grid=None, rectangle_grid=None)[source]
Bases:
objectInteractive Tkinter-based tool for buffering (expanding or shrinking) ROI shapes by specified metric millimeter by clicking on their tags.
- Parameters
img_window (Toplevel) – Tkinter Toplevel window containing an image label named ‘img_lbl’ displaying the ROI image.
original_img (np.ndarray) – Original image as a numpy array in BGR format. Used as the base for redrawing ROIs.
roi_dict (dict) – Dictionary containing ROI definitions. Keys are ROI names (str), values are dictionaries with ROI properties including ‘Shape_type’, ‘Tags’, ‘Color BGR’, ‘Thickness’, ‘Ear_tag_size’, etc. Expected shape types: ‘Rectangle’, ‘Circle’, or ‘Polygon’.
buffer_mm (int) – Buffer distance in millimeters. Positive values expand the shape, negative values shrink it.
px_per_mm (float) – Pixels per millimeter conversion factor. Used to convert buffer_mm to pixels. Must be > 0.
settings (Optional[dict]) – Optional dictionary of ROI settings. If None, uses default ROI_SETTINGS values. Default None.
hex_grid (Optional[List[Polygon]]) – Optional list of Shapely Polygon objects representing a hexagon grid overlay. Default None.
rectangle_grid (Optional[List[Polygon]]) – Optional list of Shapely Polygon objects representing a rectangle grid overlay. Default None.
ROI Interactive Modifiers
ROI Interactive Modifier UI (Tkinter)
- class simba.roi_tools.interactive_roi_modifier_tkinter.InteractiveROIModifier(img_window, original_img, roi_dict, settings=None, hex_grid=None, rectangle_grid=None)[source]
Bases:
objectInteractive Tkinter-based GUI tool for modifying ROI (Region of Interest) shapes by clicking, dragging, and keyboard controls.
This class provides an interactive Tkinter interface for modifying existing ROI shapes (rectangles, circles, and polygons) through mouse and keyboard interactions. Users can resize, reposition, and reshape ROIs by clicking and dragging control points (tags/vertices), or by using arrow keys for fine-grained adjustments. The tool supports optional grid overlays for alignment assistance and updates the ROI dictionary in-place during interactions.
Note
The img_window must contain a Tkinter Label widget with the name ‘img_lbl’ that displays the image.
For rectangles: Click and drag corner tags, edge tags (top, bottom, left, right), or center tag to modify the shape.
For circles: Click and drag the center tag to move the circle, or the border tag to resize the radius.
For polygons: Click and drag individual vertex tags to reshape the polygon, or the center tag to move the entire polygon.
After selecting a tag, arrow keys can be used for pixel-precise adjustments (sensitivity controlled by settings).
All modifications are constrained to stay within the image boundaries.
The modified ROI dictionary is updated in-place during interactions.
See also
For an OpenCV-based version, see
simba.roi_tools.interactive_modifier_ui.InteractiveROIModifier. For creating new ROIs from scratch, seesimba.roi_tools.roi_selector_polygon_tkinter.ROISelectorPolygonTkinter()andsimba.roi_tools.roi_selector_circle_tkinter.ROISelectorCircleTkinter().- Parameters
img_window (Toplevel) – Tkinter Toplevel window containing a Label widget named ‘img_lbl’ that displays the image with ROIs.
original_img (np.ndarray) – NumPy array representing the original, unmodified image without ROIs. Used as base for redrawing. Shape should be (height, width, channels) in BGR format.
roi_dict (dict) – Dictionary containing ROI definitions. Each key is an ROI name, and each value is a dictionary with shape-specific keys (e.g., ‘Shape_type’, ‘Name’, ‘Tags’, ‘Color BGR’, ‘Thickness’, etc.). Must include ‘Tags’ dictionary with control point coordinates for each ROI.
settings (Optional[dict]) – Optional dictionary of ROI display settings. If None, uses default settings from ROI_SETTINGS. Can include keys like ‘ROI_SELECT_CLR’, ‘LINE_TYPE’, ‘KEYBOARD_SENSITIVITY’, ‘OVERLAY_GRID_COLOR’.
hex_grid (Optional[List[Polygon]]) – Optional list of Shapely Polygon objects representing a hexagonal grid overlay. Gridlines will be drawn on the image for alignment assistance.
rectangle_grid (Optional[List[Polygon]]) – Optional list of Shapely Polygon objects representing a rectangular grid overlay. Gridlines will be drawn on the image for alignment assistance.
- Example
>>> from tkinter import Toplevel, Label >>> import cv2 >>> import numpy as np >>> from simba.roi_tools.interactive_roi_modifier_tkinter import InteractiveROIModifier >>> from simba.utils.enums import ROI_SETTINGS >>> from PIL import Image, ImageTk >>> # Load an image >>> original_img = cv2.imread('path/to/image.jpg') >>> img = original_img.copy() >>> # Define a rectangle ROI >>> rectangle_roi = { ... 'Shape_type': ROI_SETTINGS.RECTANGLE.value, ... 'Name': 'My_rectangle', ... 'Color BGR': (0, 0, 255), ... 'Thickness': 7, ... 'topLeftX': 100, ... 'topLeftY': 100, ... 'Bottom_right_X': 250, ... 'Bottom_right_Y': 250, ... 'Tags': { ... 'Top left tag': (100, 100), ... 'Bottom right tag': (250, 250), ... 'Center tag': (175, 175) ... }, ... 'Ear_tag_size': 15 ... } >>> roi_dict = {'My_rectangle': rectangle_roi} >>> # Draw ROIs on image (using PlottingMixin or similar) >>> # ... (drawing code here) ... >>> # Create Tkinter window with image label >>> root = Toplevel() >>> root.title('DEFINE SHAPE') >>> img_lbl = Label(root, name='img_lbl') >>> img_lbl.pack() >>> # Convert and display image >>> img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) >>> pil_image = Image.fromarray(img_rgb) >>> tk_image = ImageTk.PhotoImage(pil_image) >>> img_lbl.configure(image=tk_image) >>> img_lbl.image = tk_image >>> # Create and initialize the interactive modifier >>> modifier = InteractiveROIModifier( ... img_window=root, ... original_img=original_img, ... roi_dict=roi_dict ... ) >>> root.mainloop() >>> # After closing the window, roi_dict will contain the modified ROI coordinates
ROI Interactive Modifier UI - Legacy (OpenCV)
- class simba.roi_tools.interactive_modifier_ui.InteractiveROIModifier(window_name, roi_dict, img, orginal_img, settings=None, tkinter_window=True, hex_grid=None, rectangle_grid=None)[source]
Bases:
objectInteractive GUI tool for modifying ROI (Region of Interest) shapes by clicking and dragging.
This class provides an interactive interface for modifying existing ROI shapes (rectangles, circles, and polygons) by clicking and dragging control points (tags/vertices). Users can resize, reposition, and reshape ROIs through mouse interactions. The tool supports both OpenCV windows and Tkinter windows, and can display optional grid overlays for alignment assistance.
Note
For rectangles: Click and drag corner tags, edge tags (top, bottom, left, right), or center tag to modify the shape.
For circles: Click and drag the center tag to move the circle, or the border tag to resize the radius.
For polygons: Click and drag individual vertex tags to reshape the polygon, or the center tag to move the entire polygon.
All modifications are constrained to stay within the image boundaries.
The modified ROI dictionary is updated in-place during interactions.
See also
For creating new ROIs from scratch, see
simba.roi_tools.roi_selector_polygon_tkinter.ROISelectorPolygonTkinter()andsimba.roi_tools.roi_selector_circle_tkinter.ROISelectorCircleTkinter().- Parameters
window_name (str) – Name of the OpenCV window to display the interactive ROI editor.
roi_dict (dict) – Dictionary containing ROI definitions. Each key is an ROI name, and each value is a dictionary with shape-specific keys (e.g., ‘Shape_type’, ‘Name’, ‘Tags’, ‘Color BGR’, ‘Thickness’, etc.). Must include ‘Tags’ dictionary with control point coordinates for each ROI.
img (np.ndarray) – NumPy array representing the image with ROIs already drawn. Shape should be (height, width, channels).
orginal_img (np.ndarray) – NumPy array representing the original, unmodified image without ROIs. Used as base for redrawing. Shape should match img.
settings (Optional[dict]) – Optional dictionary of ROI display settings. If None, uses default settings from ROI_SETTINGS.
tkinter_window (bool) – If True, displays the interface in a Tkinter window. If False, uses OpenCV window. Default: True.
hex_grid (Optional[List[Polygon]]) – Optional list of Shapely Polygon objects representing a hexagonal grid overlay. Gridlines will be drawn on the image for alignment assistance.
rectangle_grid (Optional[List[Polygon]]) – Optional list of Shapely Polygon objects representing a rectangular grid overlay. Gridlines will be drawn on the image for alignment assistance.
- Example
>>> import cv2 >>> import numpy as np >>> from simba.roi_tools.interactive_modifier_ui import InteractiveROIModifier >>> from simba.utils.enums import ROI_SETTINGS >>> # Load an image >>> img = cv2.imread('path/to/image.jpg') >>> original_img = img.copy() >>> # Define a rectangle ROI >>> rectangle_roi = { ... 'Shape_type': ROI_SETTINGS.RECTANGLE.value, ... 'Name': 'My_rectangle', ... 'Color BGR': (0, 0, 255), ... 'Thickness': 7, ... 'topLeftX': 100, ... 'topLeftY': 100, ... 'Bottom_right_X': 250, ... 'Bottom_right_Y': 250, ... 'Tags': { ... 'Top left tag': (100, 100), ... 'Bottom right tag': (250, 250), ... 'Center tag': (175, 175) ... }, ... 'Ear_tag_size': 15 ... } >>> roi_dict = {'My_rectangle': rectangle_roi} >>> # Draw ROIs on image >>> # ... (drawing code here) ... >>> # Create and run the interactive modifier >>> modifier = InteractiveROIModifier( ... window_name='DEFINE SHAPE', ... roi_dict=roi_dict, ... img=img, ... orginal_img=original_img, ... tkinter_window=False ... ) >>> modifier.run() >>> # After closing the window, roi_dict will contain the modified ROI coordinates
ROI Data Import/Export
ROI CSV Importer
- class simba.roi_tools.import_roi_csvs.ROIDefinitionsCSVImporter(config_path, rectangles_path=None, circles_path=None, polygon_path=None, append=False)[source]
Bases:
simba.mixins.config_reader.ConfigReaderImport ROI definitions from CSV files into SimBA H5 format.
Converts human-readable CSV files containing ROI definitions (rectangles, circles, and/or polygons) into SimBA’s native H5 format for use in ROI analysis workflows. At least one CSV file path (rectangles, circles, or polygons) must be provided.
Note
ROI CSV files can be created from existing SimBA H5 ROI definitions using
simba.utils.data.convert_roi_definitions().- param Union[str, os.PathLike] config_path
Path to SimBA project config file in Configparser format.
- param Optional[Union[str, os.PathLike]] rectangles_path
Path to CSV file containing rectangle ROI definitions. If None, no rectangles will be imported.
- param Optional[Union[str, os.PathLike]] circles_path
Path to CSV file containing circle ROI definitions. If None, no circles will be imported.
- param Optional[Union[str, os.PathLike]] polygon_path
Path to CSV file containing polygon ROI definitions. If None, no polygons will be imported.
- param bool append
If True, append ROI definitions to existing ROI_definitions.h5 file. If False, overwrite existing file. Default: False.
- example
>>> importer = ROIDefinitionsCSVImporter( ... config_path=r"project_folder/project_config.ini", ... rectangles_path=r"logs/measures/rectangles_20251122110043.csv", ... circles_path=r"logs/measures/circles_20251122110043.csv", ... polygon_path=r"logs/measures/polygons_20251122110043.csv", ... append=False ... ) >>> importer.run()
- example
>>> importer = ROIDefinitionsCSVImporter( ... config_path=r"C: roubleshooting\mouse_open_field\project_folder\project_config.ini", ... circles_path=r"C: roubleshooting\mouse_open_field\project_folder\logs\measures\circles_20251122110043.csv", ... rectangles_path=r"C: roubleshooting\mouse_open_field\project_folder\logs\measures
- ectangles_20251122110043.csv”,
… polygon_path=r”C: roubleshootingmouse_open_fieldproject_folderlogsmeasurespolygons_20251122110043.csv” … ) >>> importer.run()